
今天我们来讲讲关于无人机应急处置技术的规范,在无人机的安全保障体系中,“应急处置”是至关重要的一环。为了确保设备在突发状况下能够安全运行,GB 42590《民用无人驾驶航空器系统安全要求》对测试条件及操作流程做出了明确规定。
以下是无人机应急处置的核心技术要求与试验步骤汇总:
一、应急处置实验条件
开展应急处置测试前,必须严格满足以下五项前置条件:
1、空域合规:具备被测样机技术规格要求的空域条件;
2、通信通畅:地面控制单元和无人机之间满足无线电通视要求;
3、环境净空:
无人机起飞点周围环视高度角10°以上无障碍物;
周围无显著电磁信号干扰;
4、风速限制:地面风速不超过5.4m/s(3级风等级,抗风试验项目除外);
5、气压标准:86 kPa~106 kPa.e
二、实验步骤
针对对于不同的失效情况,我们需要观察无人机是否能自动完成返航、降落、悬停/空中盘旋、开伞等保护动作。失效情况及其试验方法如下。
1、链路中断或丢失:
测试方法:无人机在正常飞行状态下,关闭遥控器和地面控制设备。
观察重点:通过目视法,观察无人机是否具有相应的保护功能。
2、低电量/低油量:
我们需要根据无人机低电量/低油量失控保护功能逻辑进行测试,在GB 42590中有3种电量/油量状态:
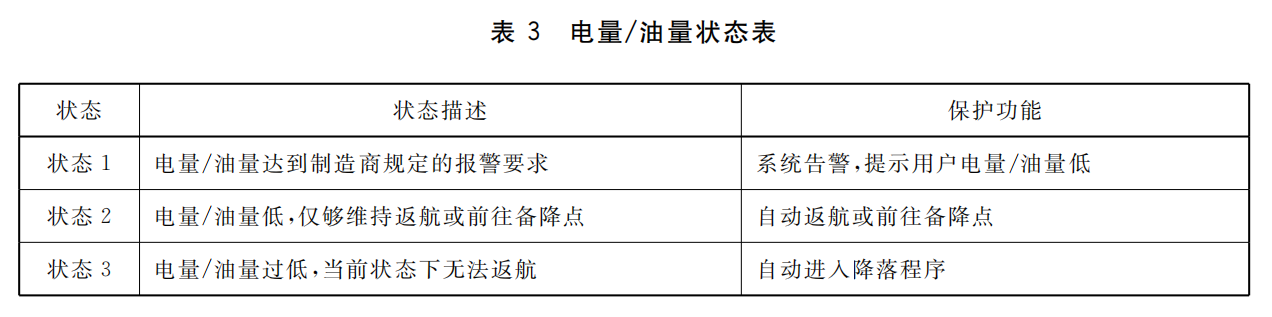
状态1:警告提示
测试方法:在正常工作状态下,控制无人机持续飞行,当电量/油量达到制造商规定的报警要求,无人机有系统告警,提示用户电量/油量低。
状态2:自动返航或前往被降点
测试方法:在正常工作状态下,控制无人机持续飞行到电量/油量低,仅够维持返航或前往备降点状态。
观察重点:通过目视法,观察无人机是否具有自动返航或前往被降点的保护功能。
状态3:无法返航状态,自动进入降落程序
测试方法:在正常工作状态下,控制无人机持续飞行到低电量/低油量,无法返航状态。
观察重点:通过目视法,观察无人机是否具有自动进入降落程序的保护功能。
补充说明:对于特定的无人机则需要在满足表3中“状态1”的基础上,可选择性满足“状态2”或“状态3”的要求,制造商应向试验机构提交安全说明文件。
3、导航失效:
测试方法:操纵无人机飞入有顶建筑物等能遮挡卫星导航信号的区域,或使用卫星导航信号干扰设备阻断无人驾驶航空器接收卫星导航信号,持续30s。
观察重点:观察无人机是否通过操控软件或产品说明书给出的其他方式进行提示、告警。
